Latest news about Bitcoin and all cryptocurrencies. Your daily crypto news habit.
Enhancing Highway Safety for the Long-Haul
Eight months ago, I joined Starsky Robotics as our Director of Safety Policy. I’ve previously worked on FAA certified avionics, automotive electronics systems, and most recently focused on safely integrating unmanned aerial vehicles into the U.S. national airspace. Safety is a critical concern for each of these industries and is at the core of our approach to automation at Starsky. To that end, Starsky’s first step after raising our Series A was bringing me on board to ensure our commitment to safety is an actionable part of everything we do when putting driverless trucks on America’s highways.
Our safety strategy begins with an understanding of the term “safety” itself. At Starsky, we use the International Organization for Standardization’s definition, which is commonly employed by OEMs designing automobiles: safety is the absence of “unreasonable risk.” No human designed system can ever be perfectly safe. This means that instead, enhancing safety is first and foremost about understanding, quantifying, and mitigating risk. Developers should take steps to identify and mitigate as many risks as possible when designing any safety-critical system. Starsky’s threshold for deployment is to achieve “no unreasonable risk” — that is, we must ensure that an unmanned truck is as safe or safer than trucks currently on U.S. roadways. This idea provides the basis for our engineering and testing process.
Today, we are releasing our Voluntary Safety Self-Assessment (VSSA), which was written to provide insights into our approach to safety in developing unmanned trucks. Eight other AV companies have published VSSAs to date. Starsky is the first company to publish a VSSA specific to automated trucks (and by an order of magnitude the smallest team to release one). We hope you find our report informative and interesting — we want readers to come away having learned something about Starsky and safety engineering. It may be dry reading, but what it lacks in form it makes up for in substance.
You can read our full report here, but if you’re looking for the short version, I’ve got you covered.
Starsky was founded on the idea that long-haul trucking is a difficult job. In many respects, trucking is more a lifestyle than a profession — long hours, immense responsibility, and often, months on the road away from home and family. Today, the 50,000-person long-haul driver shortage is one of the most significant pain points for the trucking industry and has a very real impact on the cost of goods.
Driving large trucks requires skilled workers. However, the most painful part of over-the-road trucking — long, monotonous stretches of highway that keep drivers away from home — are actually the easiest parts of the driving task to automate. Our system allows well-trained, highly-skilled truck drivers to sit in an office and control a truck remotely (known as teleoperation). Drivers can use their skills to remotely drive a truck from a distribution center to a highway, where automation can take over. At this point, the truck driver is only monitoring the truck to help with complex, context-based decisions — instances where automated decision-making is quite difficult. When the truck exits the highway, the driver regains control and uses remote control to get the truck to its final destination.
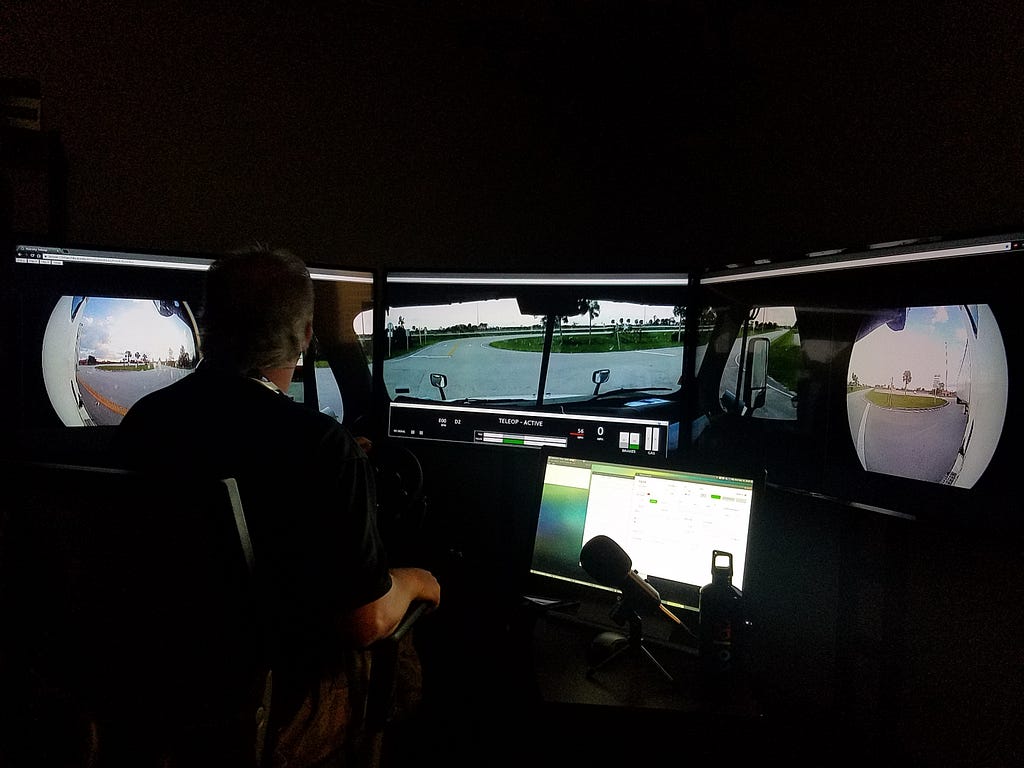 Starsky’s teleoperation center
Starsky’s teleoperation center
Our VSSA describes our thinking about safety processes and the implications of our very specific application of automation. Starsky trucks do not need to drive everywhere in all environments and conditions. They only need to drive themselves on deliberately selected highway routes that we can survey and authorize. In other words, our Operational Design Domain (ODD) is very specific.
Our initial ODDs will define the exact routes where our trucks are allowed to drive under particular lighting, weather, and traffic conditions. Unlike most companies working on passenger vehicles, we don’t need to understand how to operate automated systems in complex environments like urban centers: our skilled teleop drivers provide the smarts for these complicated situations. Starsky is unique in this respect — we highly value the importance of using well-trained remote drivers as a key part of the decision-making process for an unmanned vehicle.
This means we can define narrow, deterministic tasks that our system must must accomplish (“stay in lane”, “adjust speed relative to traffic ahead”, etc.) We can create performance standards for each narrow task and execute tests that objectively demonstrate that our system meets these standards. Our job is to understand when our system can meet these criteria and when it cannot (if we cannot, for example, adequately identify lane lines on a specific road in adverse weather conditions we will not operate our trucks on that road, in that environment). We use this understanding to hone our ODD rules about when, where, and under what conditions we allow our trucks to drive autonomously.
Our VSSA also explains our strategy for handling issues or potential system failures by detecting these events and implementing fallback behaviors to put the system in a safe state. When the truck detects any problem that would compromise safe driving, the system will achieve a Minimal Risk Condition (MRC), such as pulling over to the shoulder. When possible, the MRC will prioritize keeping the remote-human driver in the loop to allow the truck to pull off the road in a safe, controlled manner.
The VSSA we publish today is reflective of our current technology and practices. We will improve our systems based on an iterative process of adding features, expanding our ODD, and continuous improvement procedures. Like our technology, our VSSA will be updated as we continue to evolve and improve our system. Readers should expect our VSSAs to continue to communicate detailed, specific information about our safety procedures and design process.
Starsky is committed to keeping policymakers, stakeholders, and the public in the loop throughout our development effort. Through the entirety of this process, a robust safety culture and the implementation of systems engineering practices are key to achieving our goals. We’re excited to release our VSSA as part of a critical partnership with government and the public as we work to make driverless trucks real.
Understanding Starsky Robotics’ Voluntary Safety Self-Assessment was originally published in Hacker Noon on Medium, where people are continuing the conversation by highlighting and responding to this story.
Publication date
Disclaimer
The views and opinions expressed in this article are solely those of the authors and do not reflect the views of Bitcoin Insider. Every investment and trading move involves risk - this is especially true for cryptocurrencies given their volatility. We strongly advise our readers to conduct their own research when making a decision.